|
Hi! I am a final-year PhD student in computer science at the University of Ulm, advised by Timo Ropinski. During my PhD, I closely collaborate with Johanna Wald and Federico Tombari at Google, and I was funded by and collaborated with the Bosch Center for AI during the first three years of my PhD. My research lies at the intersection of 3D scene understanding and embodied AI. I focus on developing scene representations that go beyond object-centric models by capturing object semantics, interactions, and relationships, with applications in robotics and AR/VR. I received my master's degree in computer science from the University of Tübingen, where I worked on multi-view and symmetry-aware 6D pose estimation under the supervision of Andreas Geiger and Gerhard Neumann, in collaboration with BCAI. Previously, I earned my bachelor's degree in computer science from DHBW Stuttgart and gained industry experience through multiple internships at Bosch in robotics and autonomous driving perception. |

|
|
Hi! I am a final-year PhD student in computer science at the University of Ulm, advised by Timo Ropinski. During my PhD, I closely collaborate with Johanna Wald and Federico Tombari at Google, and I was funded by and collaborated with the Bosch Center for AI during the first three years of my PhD. My research lies at the intersection of 3D scene understanding and embodied AI. I focus on developing scene representations that go beyond object-centric models by capturing object semantics, interactions, and relationships, with applications in robotics and AR/VR. I received my master's degree in computer science from the University of Tübingen, where I worked on multi-view and symmetry-aware 6D pose estimation under the supervision of Andreas Geiger and Gerhard Neumann, in collaboration with BCAI. Previously, I earned my bachelor's degree in computer science from DHBW Stuttgart and gained industry experience through multiple internships at Bosch in robotics and autonomous driving perception. |
|
|
|
|
|
|
|
|
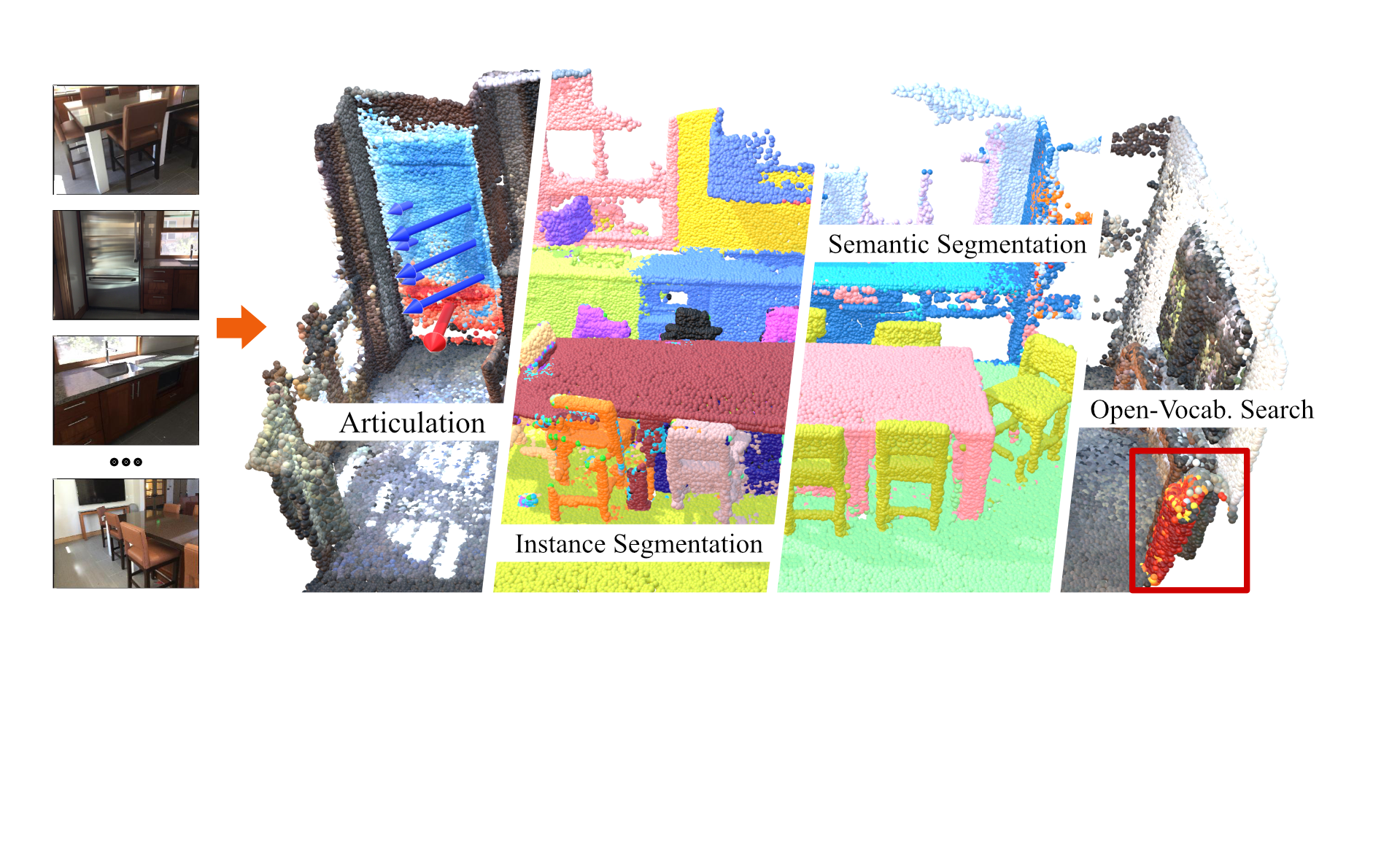 |
Sebastian Koch, Johanna Wald, Hidenobu Matsuki, Pedro Hermosilla, Timo Ropinski, Federico Tombari paper | project page | bibtex A single feed-forward model that unifies multiple 3D semantic tasks from RGB input. |
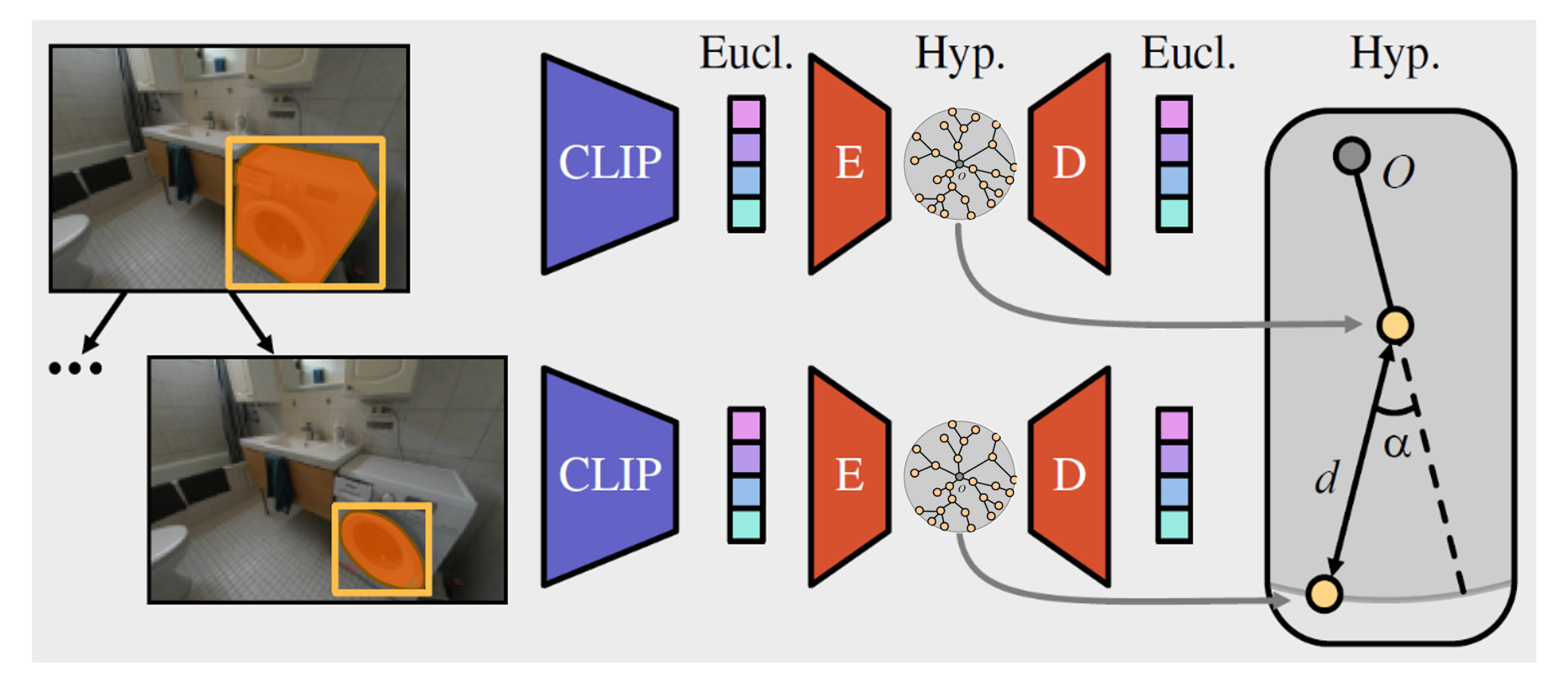 |
Lisa Weijler, Sebastian Koch, Fabio Poiesi, Timo Ropinski, Pedro Hermosilla Advances in Neural Information Processing Systems (NeurIPS) , 2025 paper | project page | bibtex Radiance fields with hyperbolic open-vocabulary features enabling reasoning over object hierarchies. |
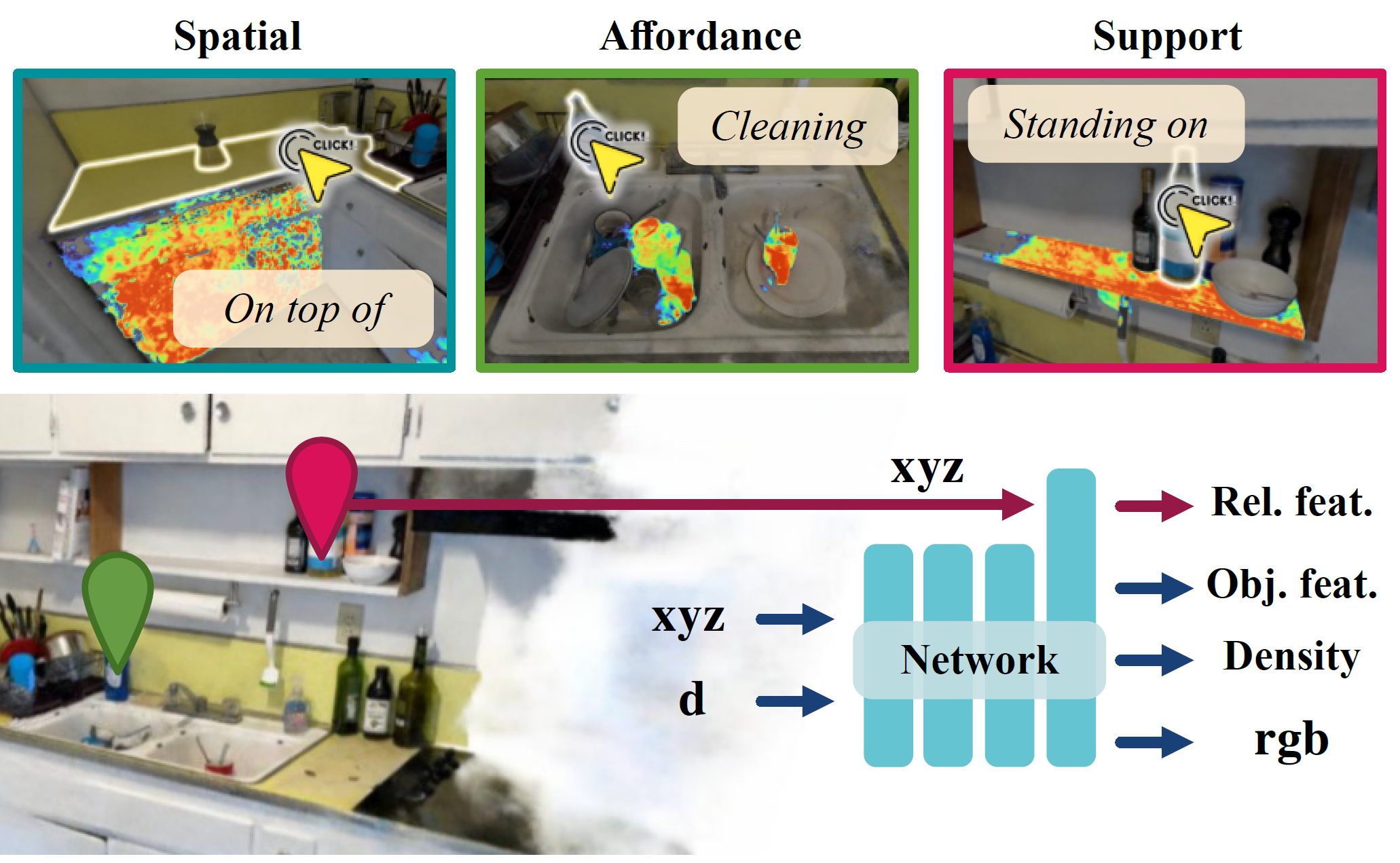 |
Sebastian Koch, Johanna Wald, Mirco Colosi, Narunas Vaskevicius, Pedro Hermosilla, Federico Tombari, Timo Ropinski IEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR) , 2025 paper | project page | code | bibtex Open-Vocabulary 3D Relationships in Radiance Fields, learned solely from 2D image supervision. |
 |
Yuchen Liu, Luigi Palmieri, Sebastian Koch, Ilche Georgievski, Marco Aiello IEEE International Conference on Robotics & Automation (ICRA) , 2025 paper | project page | bibtex Long-term robot task planning with 3D Scene Graphs and LLMs. |
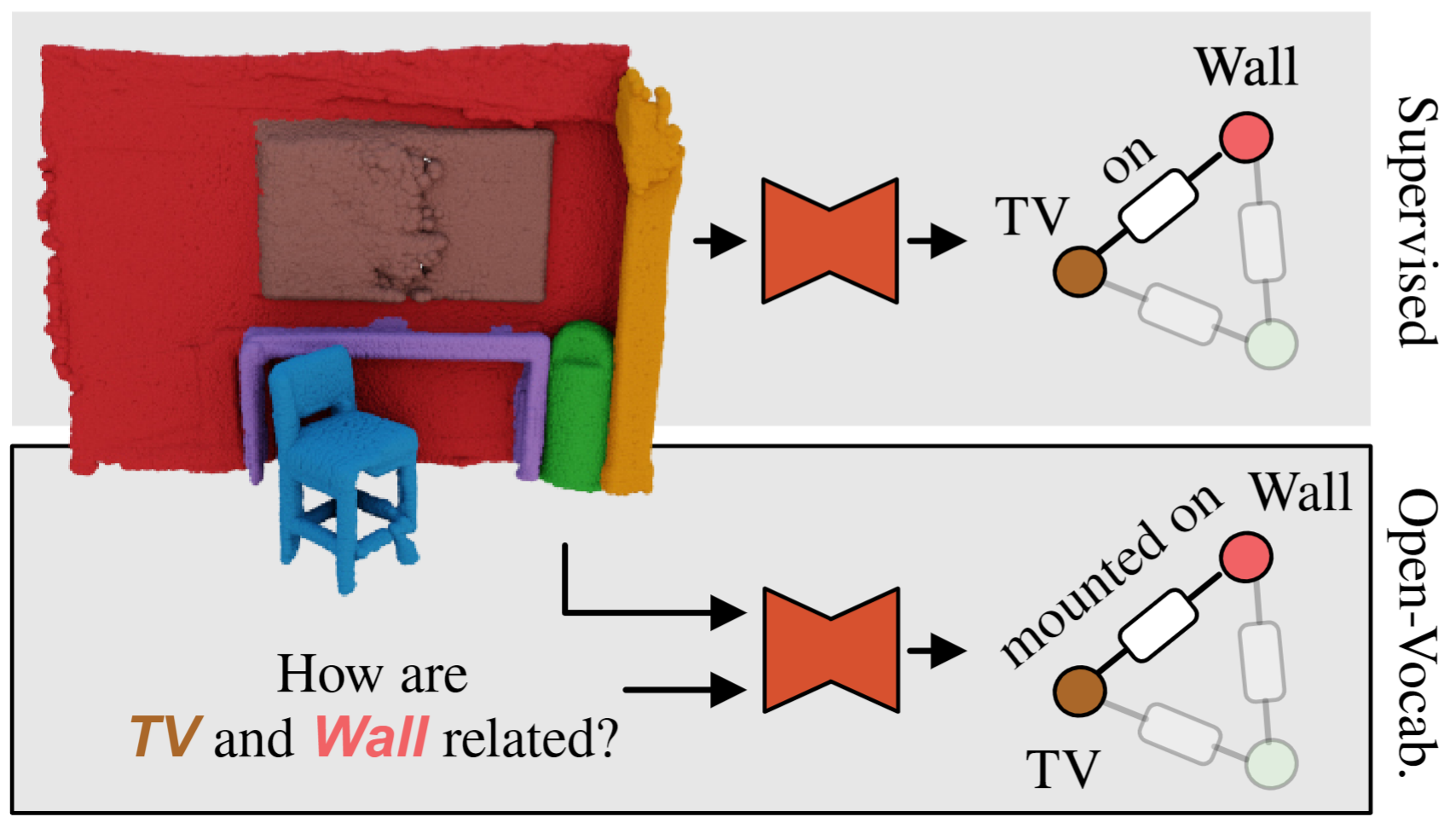 |
with Queryable Objects and Open-Set Relationships Sebastian Koch, Narunas Vaskevicius, Mirco Colosi, Pedro Hermosilla, Timo Ropinski IEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR) , 2024 paper | project page | poster | code | video | bibtex The first open-vocabulary 3D scene graph method with open-world relationships. |
|
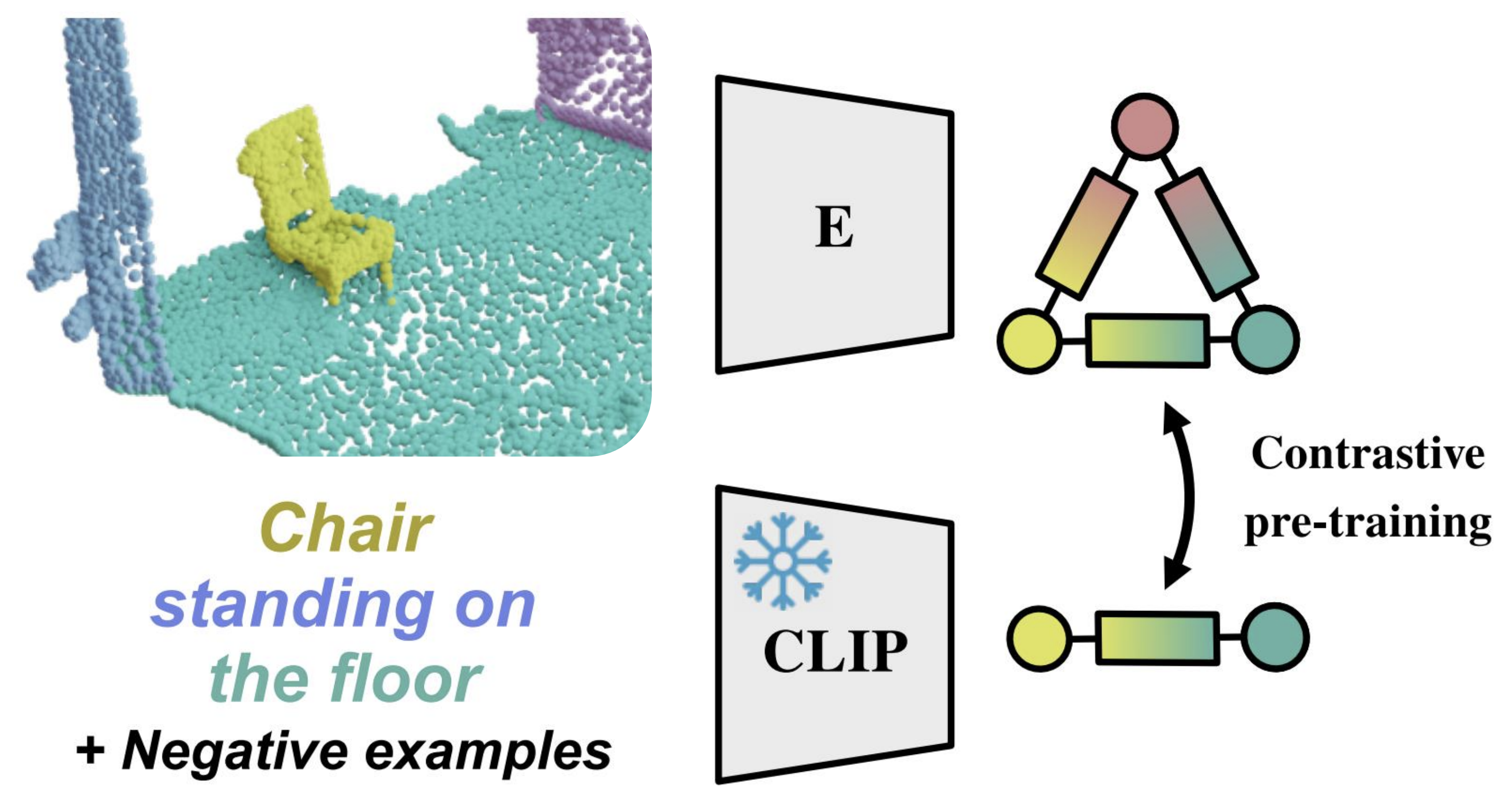
Sebastian Koch, Pedro Hermosilla, Narunas Vaskevicius, Mirco Colosi, Timo Ropinski International Conference on 3D Vision (3DV), 2024 paper | project page | poster | bibtex Language and 3D scene graph alignment using contrastive pre-training. |
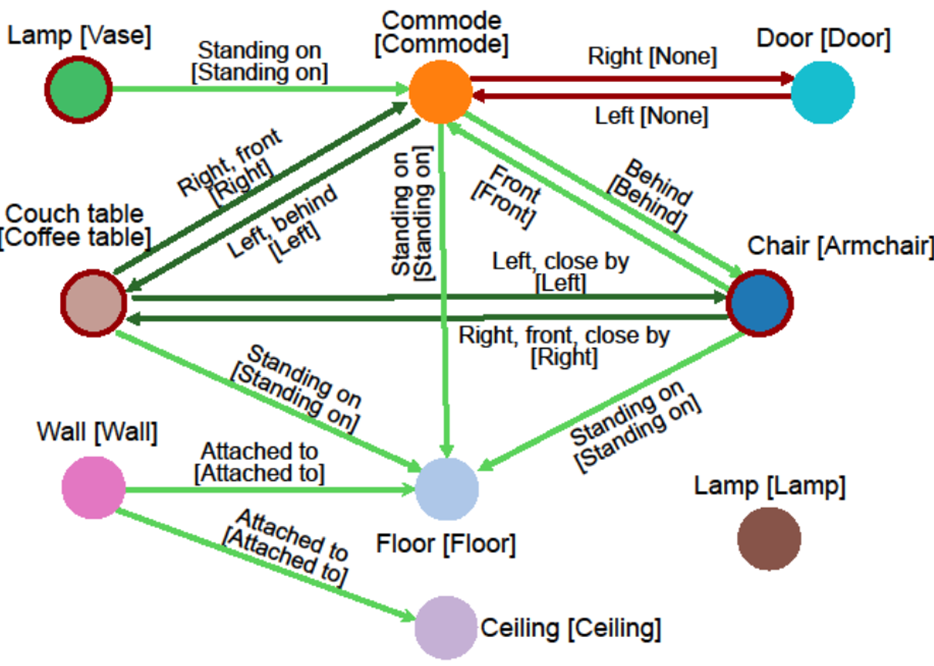 |
Sebastian Koch, Pedro Hermosilla, Narunas Vaskevicius, Mirco Colosi, Timo Ropinski IEEE Winter Conference on Applications of Computer Vision (WACV), 2024 paper | project page | poster | video | bibtex A label-efficient method to predict 3D semantic scene graphs for indoor environments. |
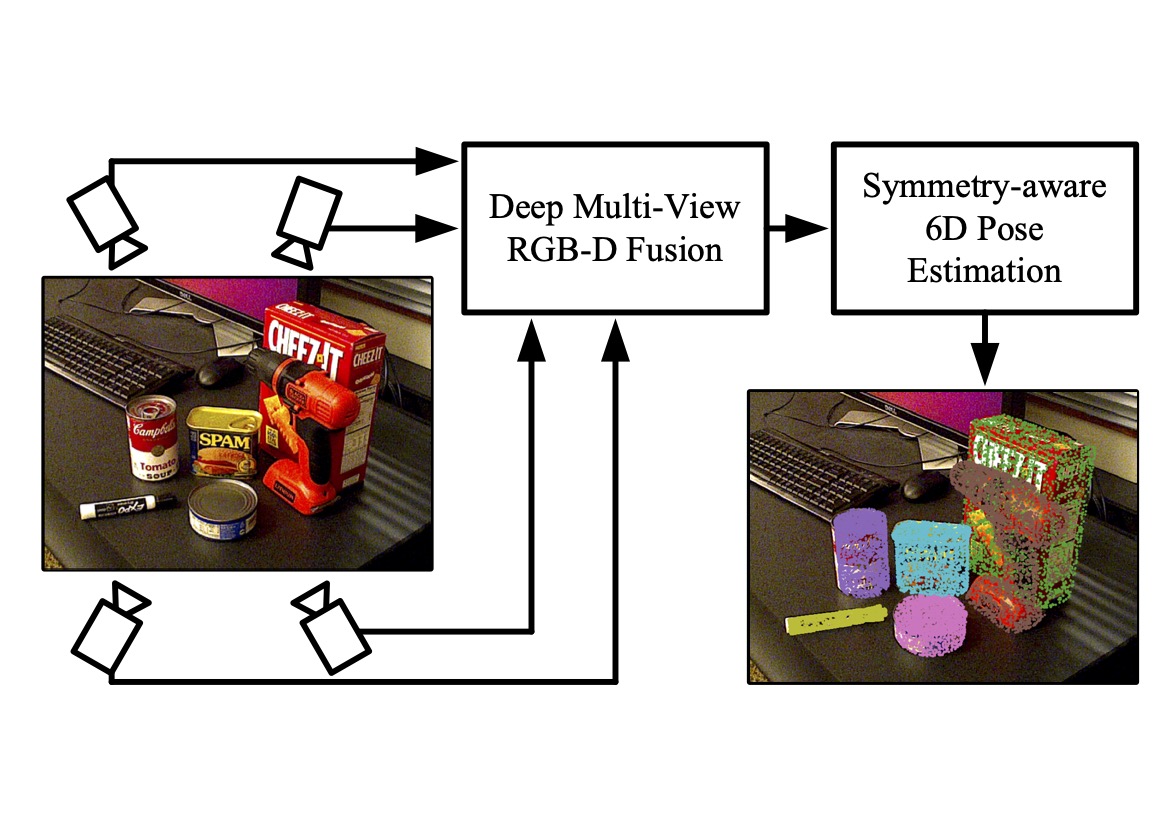 |
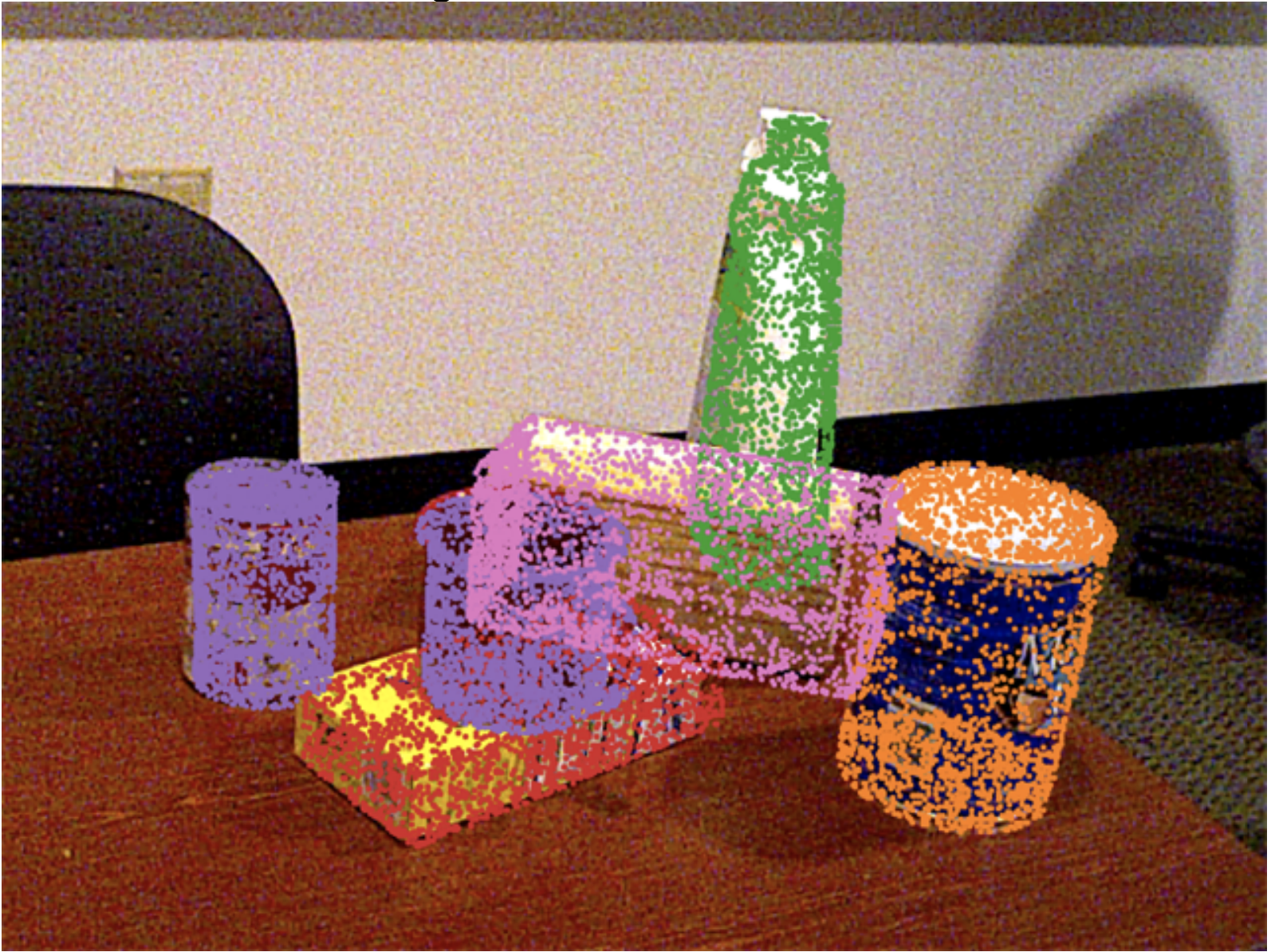
Fabian Duffhauß, Sebastian Koch, Hanna Ziesche, Ngo Anh Vien, Gerhard Neumann IEEE Robotics and Automation Letter (RA-L), 2023 & International Conference on Robotics and Automation (ICRA) 2024 paper | code | bibtex A 6D pose estimation approach utilizing multiple viewpoints and considering object symmetries. |
 |
Sebastian Koch, M.Sc. Thesis, University of Tübingen, 2022 thesis | slides | bibtex |
 |
Leon Amadeus Varga, Sebastian Koch, Andreas Zell, Remote Sensing, 2022 paper | code | bibtex |